Lazy Bot
Millind Pattanaik , Kushal Sai G , Anirudh Prasad , Aditya Agarwal
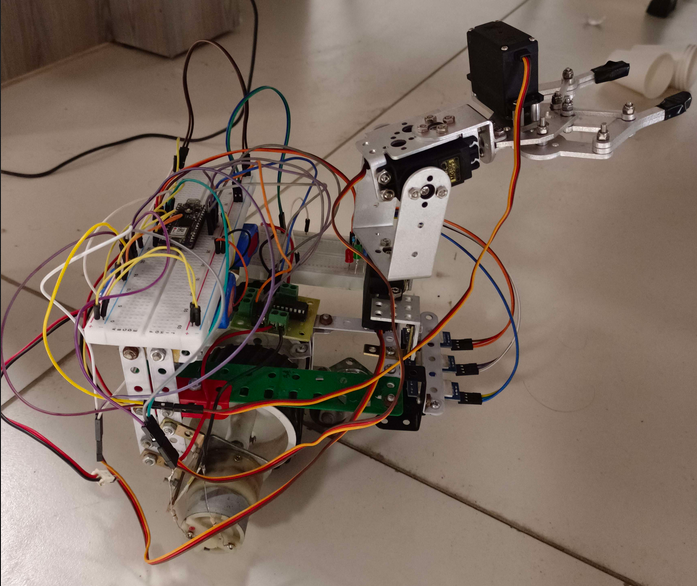
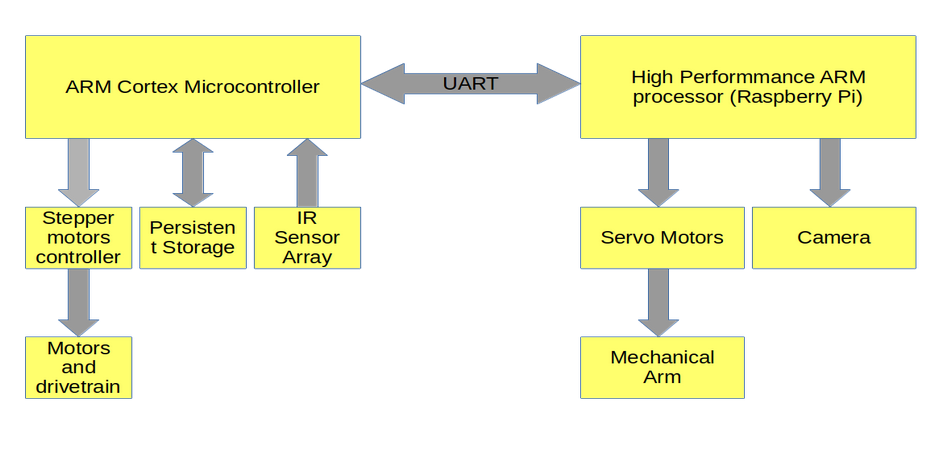
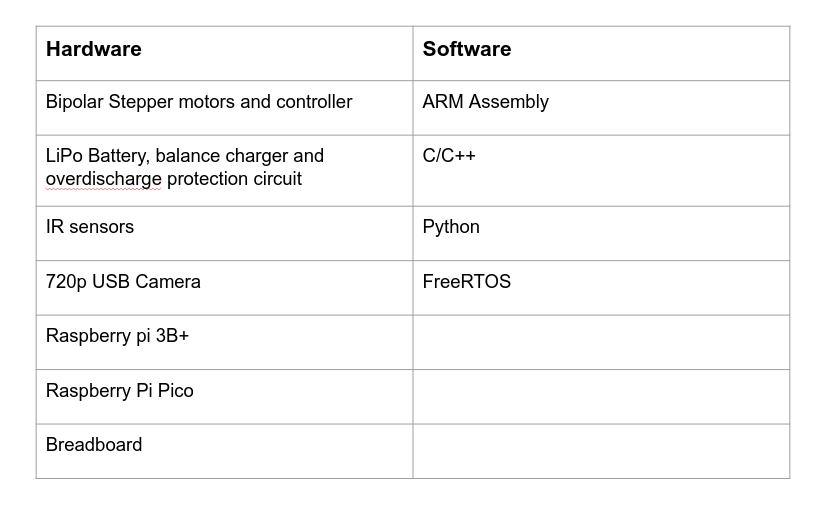
LazyBot is a working 4/2WD robot with stepper motors, mechanical arm of 3 DOF , attached sensors and display. The robot goes through a one-time mapping phase where it follows and “memorizes” taped paths. QR codes placed above the aisles are used by the robot to detect the aisles containing items as well as to position itself. Once the mapping phase is complete, users can provide a list of items and the robot finds the optimal route to each item and fetches it back to the user. A camera is used to detect the exact position and orientation of the items in the aisle and this information is used by the mechanical arm to grab the item. I worked on object detection , computer vision and integration of robotic arm with vision system using inverse kinematics with Deep Reinforcement Learning.