Sonar System
Millind Pattanaik
Sonar or also known as Sonic Navigation and Ranging is a technique that uses sound propogation to navigate , measure distances, communicate with or detect objects on or under the surface of the water . Sound waves emitted by or reflected from the object are detected by sonar apparatus and analyzed for the information they contain .
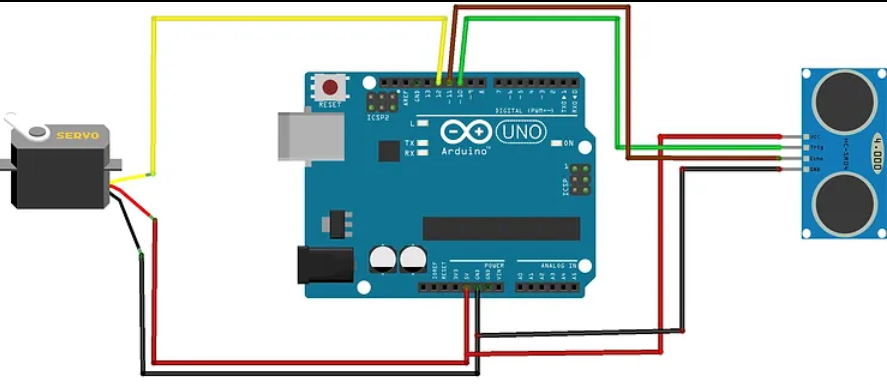
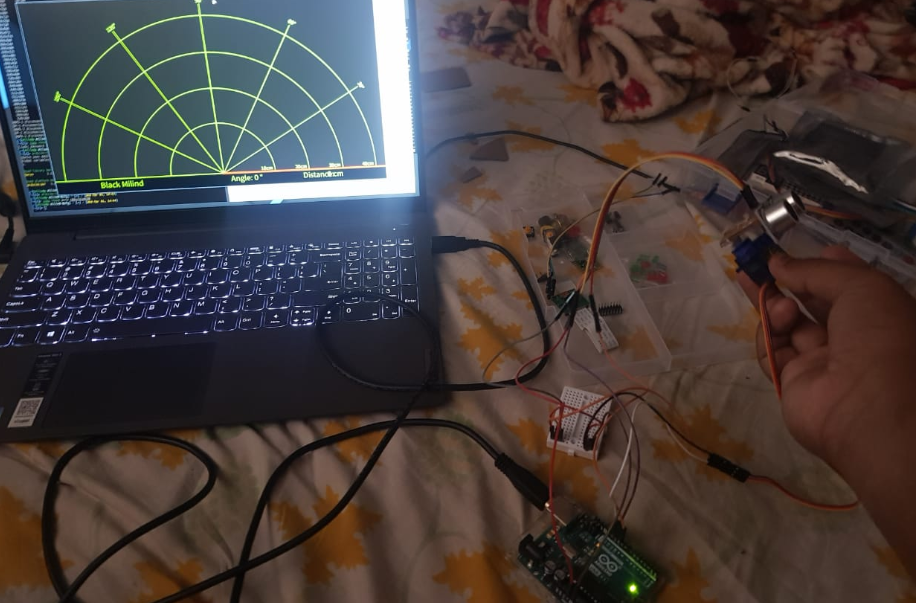
This project uses Arduino UNO R3 microcontroller which has an ATmega328P processor for controlling the movement of the SG90 servo motor and the HC-SR04 ultrsonic senor . The HC-SR04 is placed on top of the servo motor with the help of carboard and hot glue gun . The Ultrasonic Sensor sends an ultrasonic burst of pulses from the transmitter to the targeted object for detection and the servo motor give the sensor a 180 degree rotation for more area coverage . The arduino code is written in C for the control of the SG90 and HC-SR04 where as pyserial is used for a serial connection between the sonar GUI and the arduino.